项目
我参与开发的软件工程与机器人项目列表。
Research
自主助行运动导引移动机器人
融合 Azure Kinect 深度数据和压力感应智能鞋垫的助行机器人系统,可实时估计受训者的动态稳定裕度。
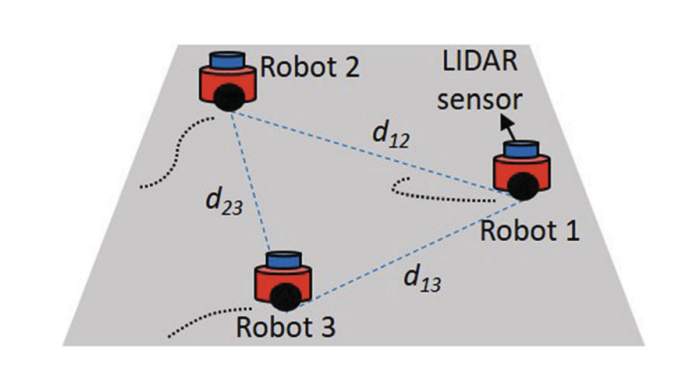
移动机器人编队控制
状态反馈编队控制算法与 V-REP 仿真,结合仅基于激光雷达输入的去中心化神经网络实现编队控制。
我参与开发的软件工程与机器人项目列表。
融合 Azure Kinect 深度数据和压力感应智能鞋垫的助行机器人系统,可实时估计受训者的动态稳定裕度。
状态反馈编队控制算法与 V-REP 仿真,结合仅基于激光雷达输入的去中心化神经网络实现编队控制。